في هذا المقال سنتعرف على الروبوتات بشكل عام و انعكاس التقنيات الحديثة في الذكاء الاصطناعي عليها.
وقبل البدأ في الحديث عليك أن تعلم بأن هنالك ثلاث فئات رئيسية من الروبوتات وهي كالتالي:
1 – الروبوتات المُناوِلة ”manipulators“: مثل الروبوت الذراعي و هم مرتبطون جسديًا أو فيزيائياً بمكان عملهم.
2 – الروبوتات المتنقلة ”mobile robots“: مثل المركبات الأرضية الغير مزودة بركاب، والطائرات الجوية بدون طيار (طائرات الدرون).
3 – الروبوتات المناولة المتحركة ”mobile manipulators“: والتي تجمع كلا النوعين، فكر في تلك الروبوتات البشرية المشهورة في الأفلام.

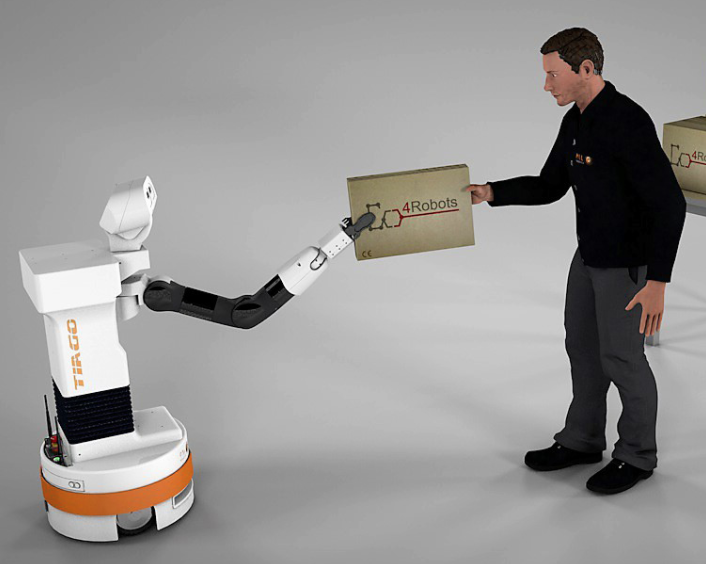
وظفت الروبوتات في الاستخدام الصناعي منذ زمن طويل، حيث يمكن للجيل الحديث من الروبوتات المستقلة بالتحكم الذاتي، الشعور والاستجابة لبيئتهم، لتخطيط أفعالهم و أهدافهم. ليس هذا فقط! بل والعمل جنبا إلى جنب مع البشر.
أما عن كيفية عمل الروبوتات. تتضمن الأنظمة الروبوتية تقنيات وتخصصات متعددة ، بما في ذلك الهندسة الميكانيكية والكهربائية والحاسب (هندسة الميكاترونكس) وتعلم الآلة ورؤية الحاسوب والتخطيط وحتى التعرف على الكلام.
واحدة من الأشياء التي تجعل الروبوتات صارمة ألا وهو عدم اليقين ”uncertainty“. فإذا لم يتمكن الروبوت من مراقبة بيئته المحيطة ولنقل أن هناك شيئًا يحجب رؤيته، فسيبدأ في اتخاذ قرار مستند إلى معلومات جزئية غامضة متحيزة والتي قد تسبب خسائر طائلة سواءاً في جسم الروبوت نفسة أو البيئة المحيطة به. ولكن الروبوتات التي تدعم المنطق في ظل عدم اليقين يمكن أن توفر معلومات مفصلة عن حالتها الحالية والتي على أساسها تتخذ القرارات التالية الصحيحة.
أما عن العناصر الرئيسية في الروبوتات فهي أجهزة الإستشعار(الحساس) ”sensors“ و المستجيبات ”effectors“. حيث تمكن أجهزة الاستشعار الروبوتات من إدراك بيئتهم. وتحتوي أجهزة الإستشعار على نوعين أساسيين وهي المستشعرات السلبية/غير الفعال ”passive“ (لا تولد فرق جهد) مثل الكاميرات ، والمستشعرات النشطة/الفعالة ”active“ (تُولد فرق جهد) و التي ترسل الطاقة إلى البيئة لتنعكس مرة أخرى ، مثل السونار.
يشمل الاستخدام الرئيسي لأجهزة الاستشعار في الروبوتات مثل محددات المدى لتحديد و اكتشاف المدى والتي تستخدم لقياس مسافة الأشياء و الأجسام القريبة منها. وأجهزة استشعار الموقع ، التي تحدد موقع الروبوت. وأجهزة الاستشعار ذات الإدراك الحسي ، التي تبلغ الروبوت بحركته الخاصة وموضع مفاصله. على سبيل المثال، أجهزة استشعار قوة و عزم الدوران والتي تقيس مدى صعوبة التي يواجهها الروبوت على قبض شيء ما أو انعطافه/دورانه. أما عن المستجيبات في الروبوتات ، مثل الأرجل والعجلات والمفاصل والمقابض للتفاعل الجسدي للبيئة المحيطة بها.
تلعب رؤية الحاسوب وتعلم الآلة دورًا مهمًا في القدرة على الإدراك والفهم في الروبوتات ، ويلعب التخطيط دورًا مهمًا في عملها وتصرفاتها.
أما عن نقطة تقاطع تقنيات اللغة مع الروبوتات كما ذكرت في الروبوتات المتنقلة ”mobile robots“ فأجزم أنه في المستقل القريب جدا ستتوفر تطبيقات حيث يتفاعل الروبوتات والبشر معًا في البيئة وربما التعاون للوصول إلى هدف أو حل مهمة، وأعتقد أن اللغة الطبيعية تزداد أهمية في هذا السياق، لأن البشر يفضلون التفاعل مع الروبوتات باستخدام اللغة الطبيعية وإجراء حوار طبيعي مع الروبوت بدلا من الاضطرار إلى استخدام أوامر الإيقاف أو استخدام نوع من وحدة التحكم المخصصة للروبوت وذلك لأن البيئات التي نرغب فيها باستخدام الروبوتات عبارة عن بيئات مرهقة ومحفوفة بالمخاطر ولذلك يتوجب علينا السماح للبشر بالتواصل معها بشكل طبيعي قدر الإمكان. لأننا جميعًا نجزم أنه عندما نكون تحت الضغط الشديد ، قد يكون من الصعب بالنسبة لنا تذكر الرموز الخاصة بنا حتى نتمكن من إنجاز شيء ما. إذاً ستكون تكنولوجيات اللغات أساسية في مجال الروبوتات التعاونية.
الشيء الوحيد الذي يهمني هو فكرة كيفية السيطرة على الروبوت، أو سؤال الروبوت، عن شيء ما في بيئته، والذي يجب عليه إدراكه والتعرف عليه.
ما أقصده، هي الحالة التي قد يطلب فيها الإنسان من الروبوت أن يلتقط شيئًا ، أو ينتقل إلى موقع معين ، وبالطبع سيحتاج الروبوت إلى فهم الوصف الذي أصدرة الإنسان ثم يقرر أيًا من هذة الأشياء التي يمكن أن يدركها في البيئته التي يشير إليها الإنسان بالفعل. لذا إذا قلنا له اذهب إلى جانب تلك السيارة هناك، قد يضطر الروبوت إلى مسح البيئة المرئية، و يكون ذلك واضحاً وسهلاً إذا كان هناك سيارة واحدة فقط في البيئة المحيطة به، ولكن عنما يكون هناك أربعة أو خمسة سيارات، سوف يقوم الروبوت بالسؤال عن الاتجاه أو المسافة التي نتحدث عنها فيما يتعلق بالسيارة و التي هي الهدف الفعلي.
وعلى كل حال، هذا المجال يزال مجالا للبحث والتطوير. لذا فإن تطبيقات الروبوتات آخذة في التوسع يوما بعد يوم ، حيث أن العديد من التقنيات الأساسية بما في ذلك أجهزة الاستشعار وتعلم الآلة ورؤية الحاسوب تستمر في التحسن. و تشمل التطبيقات التصنيع والزراعة حيث نرى الجرارات المتحكمة بذاتها. أيضاً من ناحية النقل، نرى سيارات وشاحنات مستقلة التحكم. أما في مجالات الرعاية الصحية تستخدم الروبوتات الجراحية على نطاق واسع وكذلك الروبوتات المتنقلة التي تقدم الإمدادات في المستشفيات والبيئات الخطرة. أيضا الهياكل الخارجية التي يتم ارتدائها على الجسم لمساعدة ذوي الاجتياجات الخاصة على التحرك. ليس ذلك فقط، حيث يمكن استخدامها لتنظيف النفايات السامة. والخدمات الشخصية مثل المكانس الكهربائية و جزازات العشب وقطع الأشجار و مساعدة العمال على رفع الأحمال الثقيلة. أما من ناحية الترفيه ، نشاهد ألعابًا روبوتية تدخل إلى السوق هذة الأيام وهي مهمة جدا من ناحية توسيع مدى فكر الأطفال وكيفية التعامل معها منذ الصغر.
لتختصر ما تعلمناه في هذا المقال كالتالي:
- هنالك ثلاث أنواع رئيسية للروبوتات.
- يساهم الذكاء الاصطناعي في تطويرها.
- معالجة النصوص الطبيعية مهم جدا لنتواصل معها وكأنها من البشر.
- لا يوجد روبوت كالإنسان يمكن أن يكون مهندس أو طبيب جراح بنفس الوقت، كل روبوت لدية مهمة محددة لعملها.